FPGA-Based Dual-Resonance Solid-State Stereo Music Tesla Coil Interrupter V1
author: dewhisna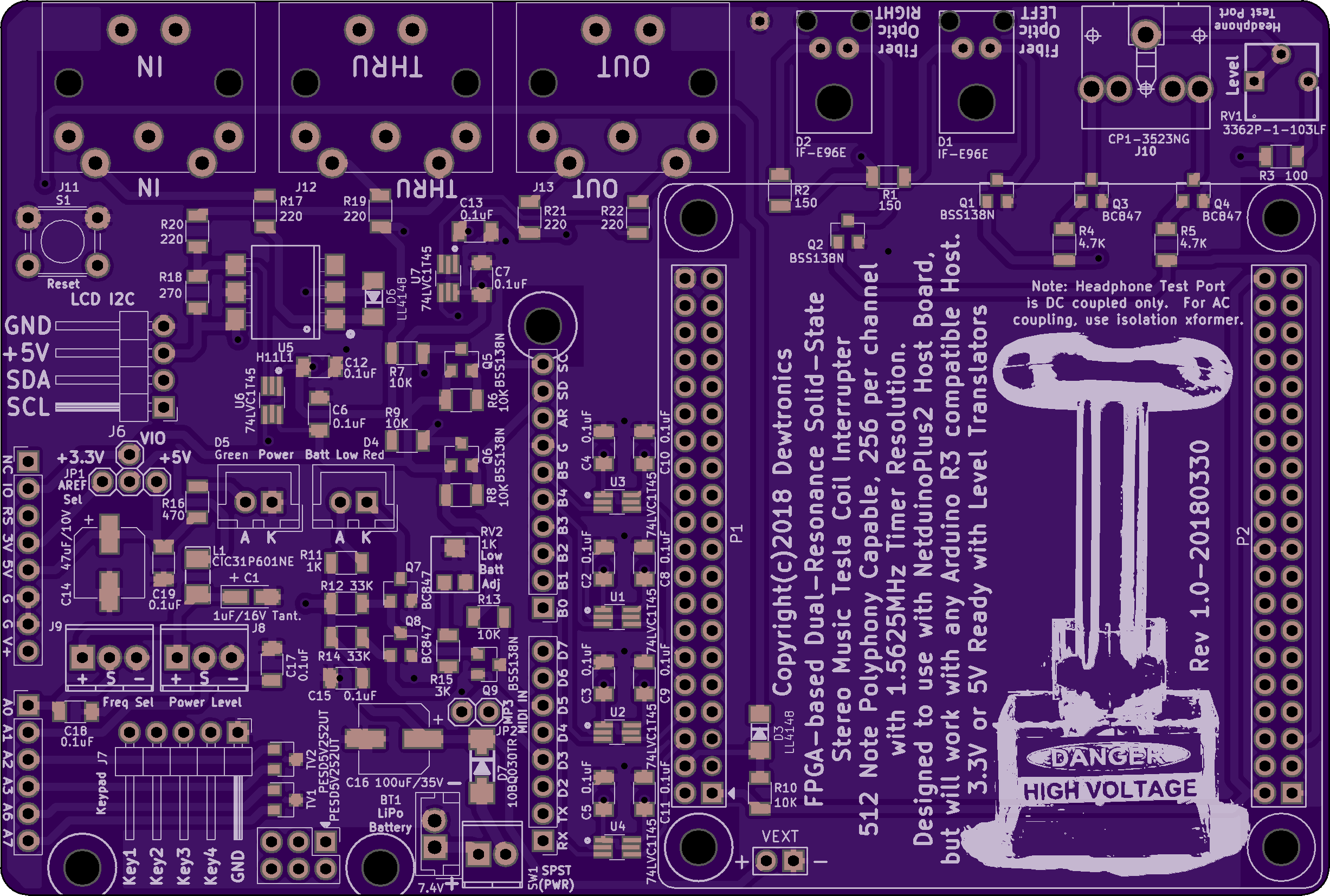
2 layer board of 4.91 x 3.31 inches (124.6 x 84.0 mm)
Uploaded:
April 09, 2018
Shared:
April 09, 2018
Total Price:
$81.05
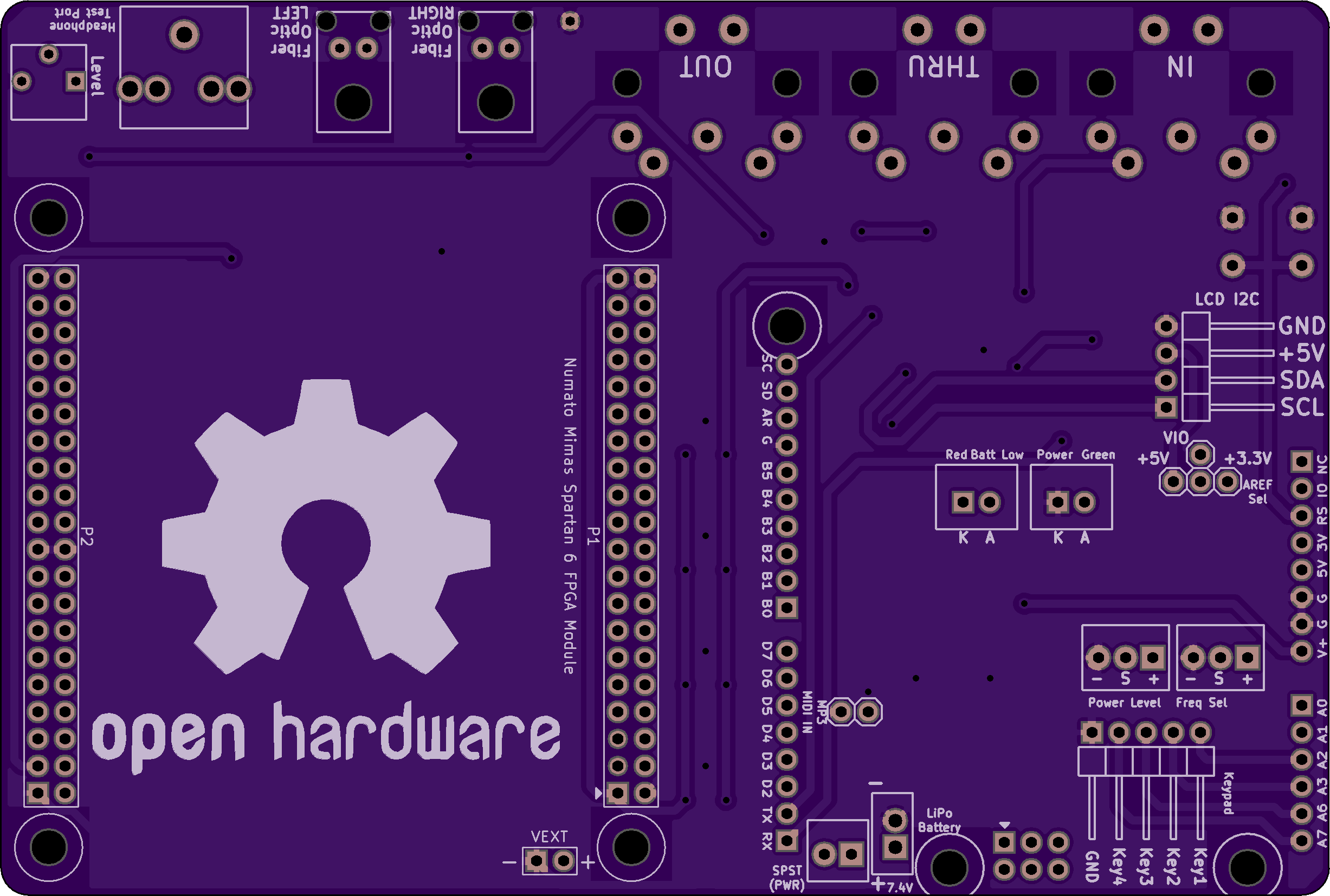
FPGA-Based Solid-State Stereo Musical Tesla Coil Interrupter interface board. Uses the Numato Mimas Spartan 6 FPGA Module to generate 512-note polyphony (256 per channel) Tesla Coil interrupter signals to drive two Musical Tesla Coils in stereo from MIDI and other audio sources at a 1.5625 MHz note-timer resolution.
It was originally designed to function with the Netduino Plus 2 host processor board, but will function with any Arduino R3 compatible host processor. It supports both 3.3v and 5v host interfaces with on-board level translators. Power can be supplied with 7.4v LiPo battery pack and monitored with on-board low-voltage detector circuit. This board includes a 4-button keypad connector and an I2C Interface circuit for connecting a 4x20 or similar character-based LCD screen (or other +5V I2C devices).
I built this to run two of the original v.1 old-style oneTesla Musical Tesla Coils running in stereo. I wanted something more hi-fidelity than their simplistic 2-note interrupter. I wanted an interrupter that you could actually play an entire orchestral piece through with complete fidelity, including pitch-bends and power level shift nuances. The only way to get enough capture-compare timers was to use an FPGA. I made the VHDL code for the FPGA available on OpenCores as Timer Output Compare Driver. Note: To access the source tree without needing an OpenCores account, click the “Browse” link next to the “SVN” label in the top left corner. The source files are in “timerocd/trunk/src/”, which can be built under the free version of Xilinx ISE. The prebuilt binary file is at “timerocd/trunk/xilinx/TimerOCD/TimerOCD.bin”, which can be loaded directly into the Numato Mimas module using the Python programming scripts on the Numato website.
Here’s a demo of the first prototype of this interrupter back when it was still running at 16-note polyphony on a single Tesla Coil: Amazing Grace on the Musical Tesla Coil. I don’t yet have a video of dual-coils on the new FPGA interrupter as I’m in the process of redesigning the primary windings to improve tunability (it isn’t perfectly tuned in this demo video – the arc should be even bigger!) and to try to alleviate some arc-over problems I’ve been experiencing (oh the joys of working with high voltage).
Final code for the host processor is still being developed.
ERRATA: The LiPo low-battery detection circuit on this board, while it works well in general, has a flaw in the output to the MCU. Due to the transistor connections between the base of Q7 and the gate of Q9, the signal to the MCU will not change when the low-battery LED is activated. One possible fix is to cut the trace going to the gate of Q9 and connect it to the collector of Q7 instead of the base of Q7. This will invert the logic level for the low-battery signal in the process, but it should let the signal actually function.
NOTE: This board has been replaced by the improved FPGA DRSSTC Interrupter V2 Board design.
FPGA-Based Solid-State Stereo Musical Tesla Coil Interrupter interface board. Uses the Numato Mimas Spartan 6 FPGA Module to generate 512-note polyphony (256 per channel) Tesla Coil interrupter signals to drive two Musical Tesla Coils in stereo from MIDI and other audio sources at a 1.5625 MHz note-timer resolution.
It was originally designed to function with the Netduino Plus 2 host processor board, but will function with any Arduino R3 compatible host processor. It supports both 3.3v and 5v host interfaces with on-board level translators. Power can be supplied with 7.4v LiPo battery pack and monitored with on-board low-voltage detector circuit. This board includes a 4-button keypad connector and an I2C Interface circuit for connecting a 4x20 or similar character-based LCD screen (or other +5V I2C devices).
I built this to run two of the original v.1 old-style oneTesla Musical Tesla Coils running in stereo. I wanted something more hi-fidelity than their simplistic 2-note interrupter. I wanted an interrupter that you could actually play an entire orchestral piece through with complete fidelity, including pitch-bends and power level shift nuances. The only way to get enough capture-compare timers was to use an FPGA. I made the VHDL code for the FPGA available on OpenCores as Timer Output Compare Driver. Note: To access the source tree without needing an OpenCores account, click the “Browse” link next to the “SVN” label in the top left corner. The source files are in “timerocd/trunk/src/”, which can be built under the free version of Xilinx ISE. The prebuilt binary file is at “timerocd/trunk/xilinx/TimerOCD/TimerOCD.bin”, which can be loaded directly into the Numato Mimas module using the Python programming scripts on the Numato website.
Here’s a demo of the first prototype of this interrupter back when it was still running at 16-note polyphony on a single Tesla Coil: Amazing Grace on the Musical Tesla Coil. I don’t yet have a video of dual-coils on the new FPGA interrupter as I’m in the process of redesigning the primary windings to improve tunability (it isn’t perfectly tuned in this demo video – the arc should be even bigger!) and to try to alleviate some arc-over problems I’ve been experiencing (oh the joys of working with high voltage).
Final code for the host processor is still being developed.
ERRATA: The LiPo low-battery detection circuit on this board, while it works well in general, has a flaw in the output to the MCU. Due to the transistor connections between the base of Q7 and the gate of Q9, the signal to the MCU will not change when the low-battery LED is activated. One possible fix is to cut the trace going to the gate of Q9 and connect it to the collector of Q7 instead of the base of Q7. This will invert the logic level for the low-battery signal in the process, but it should let the signal actually function.
NOTE: This board has been replaced by the improved FPGA DRSSTC Interrupter V2 Board design.
