PWM BLDC Motor w/Quadrature Encoder Interface Shield V2
author: dewhisna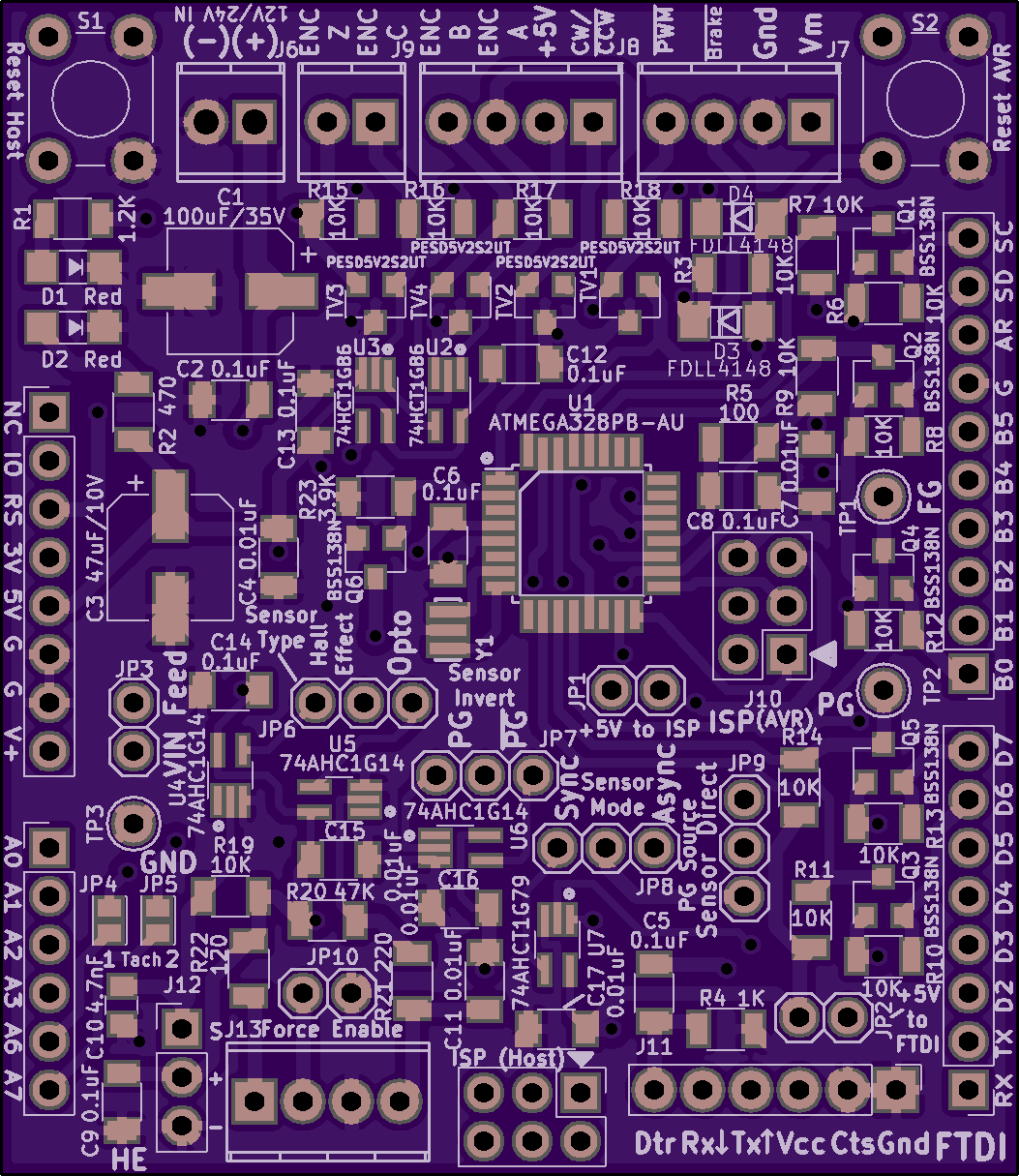
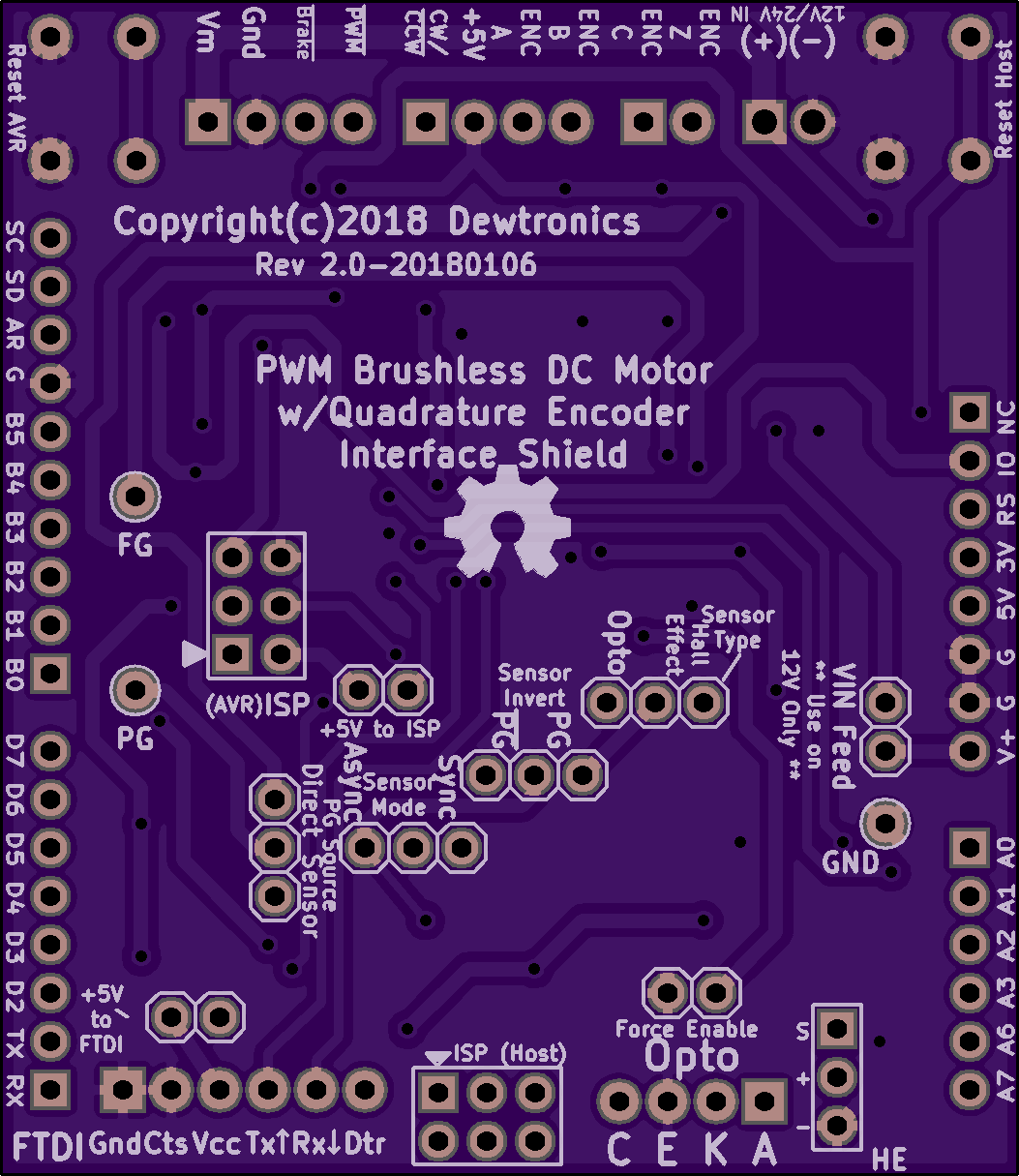
2 layer board of 2.11 x 2.43 inches (53.5 x 61.8 mm)
Uploaded:
March 22, 2018
Shared:
March 22, 2018
Total Price:
$25.55
This is Version 2 of the Arduino Compatible Interface Shield for interfacing with Blushless DC (BLDC) Motors having their own 3-Phase controllers with a PWM Speed Set Input. It supports either a two-signal 90-deg quadrature speed sensor or a 3-Phase Hall-Effect speed sensor input. It has support for either an optical reflectivity sensor or Hall-Effect sensor for Zero-Position/Index sensing or it can use an external Z-Pos Index Sensor if the motor already has one. Supports both 3.3V and 5V logic with on-board level shifters.
Unlike the original design, this version also adds an ATmega328PB (note: PB version, NOT ‘P’) coprocessor to control motor speed and provide a PID loop, which reduces the work overhead required by the main host processor on which this shield board is used. This processor is designed to communicate with the main host processor via I2C.
This version is the new replacement for the original https://www.oshpark.com/shared_projects/yW0aEBL9 design.
This is Version 2 of the Arduino Compatible Interface Shield for interfacing with Blushless DC (BLDC) Motors having their own 3-Phase controllers with a PWM Speed Set Input. It supports either a two-signal 90-deg quadrature speed sensor or a 3-Phase Hall-Effect speed sensor input. It has support for either an optical reflectivity sensor or Hall-Effect sensor for Zero-Position/Index sensing or it can use an external Z-Pos Index Sensor if the motor already has one. Supports both 3.3V and 5V logic with on-board level shifters.
Unlike the original design, this version also adds an ATmega328PB (note: PB version, NOT ‘P’) coprocessor to control motor speed and provide a PID loop, which reduces the work overhead required by the main host processor on which this shield board is used. This processor is designed to communicate with the main host processor via I2C.
This version is the new replacement for the original https://www.oshpark.com/shared_projects/yW0aEBL9 design.
