Robo Foucault Unipolar Stepper Controller
author: TelescopeLab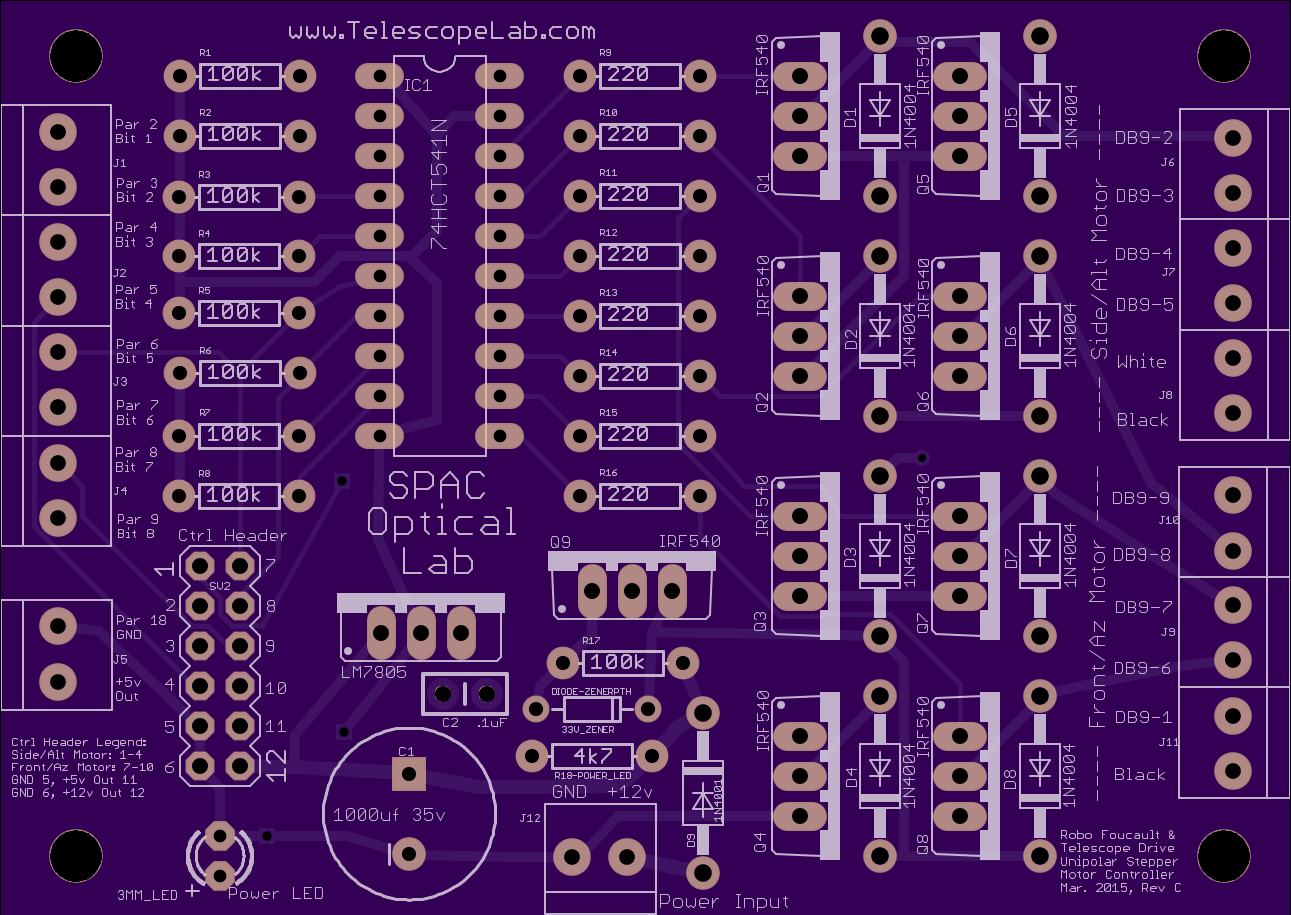
2 layer board of 3.22 x 2.29 inches (81.9 x 58.1 mm)
Uploaded:
July 22, 2015
Shared:
July 22, 2015
Total Price:
$36.85
Dual stepper motor controller for the James Lerch Robo Foucault Mirror Tester
Here’s a parts list (you still need two motors (Jameco #155433) for the platform, video capture board, appropriate camera and a Windows (XP and Vista tested) computer with a parallel port):
1 Robo Stepper Controller Circuit Board
1 20 pin soldertail socket
1 78HCT541 (or SN74HCT541N)
12 Terminal Blocks, Dual 3.5mm pitch (may omit is soldering wires to board)
9 100k 1/4 watt resistors
8 220ohm 1/4 watt resistors
1 4.7k resistor
9 IRF540 MOSFET
1 33v Zener diode
9 1N4001 Diodes
1 LM7805 5v voltage regulator
1 1000uF 35v electrolytic capacitor
1 0.1uF ceramic capacitor
1 Red LED, 3mm
1 2x6 straight header (only needed if using external control board)
1 Power supply, 12v at least 1.5A (1A is right at the limit)
1 Parallel port cable to connect the computer to the board.
1 An appropriate project box (An external hard drive case with built in power supply may work - check amp output)
At the lab the board’s output goes to a DB9 socket (labeled on the board) and a old serial cable is used to connect that to the motors. As long as the correct motor wire goes to the correct board output the connectors are up to you. More info about the wiring is here
Dual stepper motor controller for the James Lerch Robo Foucault Mirror Tester
Here’s a parts list (you still need two motors (Jameco #155433) for the platform, video capture board, appropriate camera and a Windows (XP and Vista tested) computer with a parallel port):
1 Robo Stepper Controller Circuit Board
1 20 pin soldertail socket
1 78HCT541 (or SN74HCT541N)
12 Terminal Blocks, Dual 3.5mm pitch (may omit is soldering wires to board)
9 100k 1/4 watt resistors
8 220ohm 1/4 watt resistors
1 4.7k resistor
9 IRF540 MOSFET
1 33v Zener diode
9 1N4001 Diodes
1 LM7805 5v voltage regulator
1 1000uF 35v electrolytic capacitor
1 0.1uF ceramic capacitor
1 Red LED, 3mm
1 2x6 straight header (only needed if using external control board)
1 Power supply, 12v at least 1.5A (1A is right at the limit)
1 Parallel port cable to connect the computer to the board.
1 An appropriate project box (An external hard drive case with built in power supply may work - check amp output)
At the lab the board’s output goes to a DB9 socket (labeled on the board) and a old serial cable is used to connect that to the motors. As long as the correct motor wire goes to the correct board output the connectors are up to you. More info about the wiring is here
